
24伏直流伺服电机(直流伺服电机的调速控制系统)
- 发布时间: 2021-03-05
- 分类:公司动态
- 作品声明:内容由AI生成
- 来源:网络
直流伺服电动机调速装置的功能是将速度指令信号转换成电枢的电压值,以达到调速目的。现代直流电动机调速设备通常采用晶闸管(SCR,SCR)调速系统和晶体管脉宽调制(PWM)调速系统。
1.晶闸管调速系统
1)晶闸管调速系统主电路
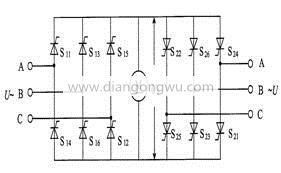
晶闸管速度控制系统使用大功率晶闸管。它具有两个功能。一种是将电网中的交流电整流并将其转换为直流电。另一个在电动机制动时在可逆控制电路中。电机的惯性性能被转换为电能,并反馈到交流电网以实现反向。要控制晶闸管,您需要提供一个触发脉冲发生器以生成适当的触发脉冲。晶闸管整流器电路有几种类型,在数控机床中常用的是三相桥式反向并联可逆电路。
如图所示,它是三相桥式反向并联可逆电路。它由12个SCR大功率晶闸管组成,晶闸管分为两组。 S11至S16是一组,而S21至S26是一组。每一组通过三相电桥连接,两组互不平行,分别实现正向和反向旋转。反向并联连接是指两组逆变器桥以反极性连接并由交流电源供电。每个晶闸管组都有两种工作状态:换向和逆变器。当一组处于换向操作时,另一组处于逆变器待机状态。当电动机速度降低时,逆变器组被激活。
三相全控桥式电路的电压波形如图所示。如图所示,晶闸管的触发角为π/3。晶闸管以π/3的间隔依次导通,并且电机每6个脉冲旋转一次。由于晶闸管以较高的速度触发,流过电动机的电流几乎是连续的。
工作过程如下。当ωt=π/6 +α时,S11打开,在此之前S16打开。因此,如果A相电压波形为π/6 +α<ωt<π/6 +α+π/3间隔,则晶闸管S11,S16导通,并且电机端子连接到A相。和B,所以Ud=UAB。如果ωt=α+π/3 +π/6,则晶闸管S12接通,由于反向偏置(自然或电网整流),电流流经S12且S16断开。此时,S11和S12接通,并且电动机两端的电压为Ud=UAC。这样,每隔π/3,另一个晶闸管就会导通,并且重复上述过程。
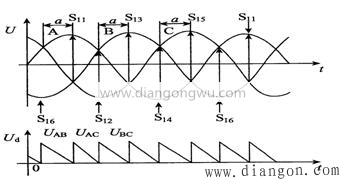
从波形图中可以看到,只要改变触发角α的值,就可以改变电动机电压的输入值,并且可以改变直流电动机的电枢电流值。进行调整以达到直流电动机调速的目的。
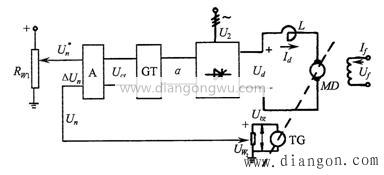
在图中,RW1是速度定位器 ,速度偏差电压,Un是速度反馈电压,ΔUn是反馈偏差电压,A是比例放大器,Uct是触发控制电压,GT是触发可控硅的控制装置。
,速度偏差电压,Un是速度反馈电压,ΔUn是反馈偏差电压,A是比例放大器,Uct是触发控制电压,GT是触发可控硅的控制装置。
系统的操作条件和自动速度调节过程如下。
当系统以相对较小的速度设置电压 运行时,由于电机暂时不旋转,因此速度反馈电压Un=0,反馈偏差电压ΔUn=
运行时,由于电机暂时不旋转,因此速度反馈电压Un=0,反馈偏差电压ΔUn= ,经过放大器后,输出较大的Uct,并且触发输出α的触发角在初始状态下从90o减小,并且整流器的输出电压在Ud=0时也上升到某个较大的值。电压(电流不超过允许值)时间开始工作。随着速度的增加,反馈电压Un上升,速度偏差电压ΔUn下降,Uct相应下降,当α上升时,整流器输出电压Ud也下降,并且电动机滑差速度也以给定速度下降,即反馈欠电压接近,电机运转平稳。如前所述,电动机速度可以接近给定速度,偏差的大小与放大倍数密切相关。但是,这种系统原则上是有偏差的,因此称为差速控制系统。
,经过放大器后,输出较大的Uct,并且触发输出α的触发角在初始状态下从90o减小,并且整流器的输出电压在Ud=0时也上升到某个较大的值。电压(电流不超过允许值)时间开始工作。随着速度的增加,反馈电压Un上升,速度偏差电压ΔUn下降,Uct相应下降,当α上升时,整流器输出电压Ud也下降,并且电动机滑差速度也以给定速度下降,即反馈欠电压接近,电机运转平稳。如前所述,电动机速度可以接近给定速度,偏差的大小与放大倍数密切相关。但是,这种系统原则上是有偏差的,因此称为差速控制系统。
4)晶闸管电源,速度和电流的双闭环直流调速系统
前述具有负反馈速度的单闭环速度控制系统实际上不能在CNC机床的进给系统中使用。 CNC机床中的高要求速度控制系统需要快速启动,制动和动态减速。采用双速闭环系统,电流一般较小等。
速度电流双闭环调速系统如图所示。为了实现速度和电流的两个反馈分别工作,系统中设置了两个调节器来分别调节速度和电流,并且在两者之间实现了级联。
2.晶体管直流脉宽(PWM)调速系统
1)晶体管速度控制系统的主电路
开关功率放大器是脉宽调制率装置的主要电路,其结构形式由H型(也称为电桥型)和T型组成。每个电路分为单极工作模式和双极工作模式,各种工作模式可以形成可逆开关放大电路和不可逆开关放大电路。
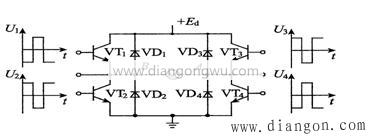
图为广泛使用的H型开关电路的工作原理,该电路是由4个二极管和4个功率管组成的桥式回路。直流电源+ Ed由3套全波整流器电源供电。从脉冲宽度调制器输出的脉冲波u1,u2,u3,u4被光电隔离器转换成具有与每个脉冲相同的相位和极性的脉冲信号U1,U2,U3,U4,并被添加到开关电源管VT1 。 ?VT4的基础。如果电动机正常运行,则在0tt1的时间间隔内,U2和U3变为高电平,并且功率晶体管VT2和VT3导通,这时在两端添加电源和+ Ed。用于为电动机供电的电枢电流的方向从电源+ Ed通过VT3→电动机→VT2→返回到电源。在时间段t1≤tt2中,U1和U3均处于低电平,VT1和VT3均终止,+ Ed被阻断。此时,U2仍处于高电平,此时,由于电枢电感,电流继续在VT2和续流二极管VD4中循环。当t2≤tt3时,U2和U3同时为正,通过VT2和VT3将+ Ed加到电动机的两端,电流继续流动。当t3≤tT时,U2和U4同时为负,电源被切断,U3为正,因此电枢电流流过VT3和VD1。从主电路获得的电压UAB是在+ Ed和O之间变化的脉冲电压。
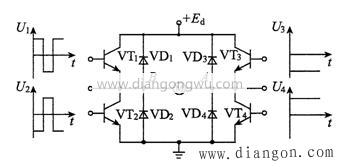
双极和单极原理图是相同的,但不同之处在于右侧的两个管的驱动信号不同。
2)晶体管直流脉宽调制(PWM)速度控制系统
(1)直流PWM伺服驱动器的工作原理
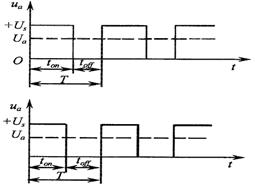
PWM驱动单元利用大功率晶体管的开关特性调制以固定频率接通和断开的固定电压DC电源,一个周期的接通和断开时间如下:您可以通过更改直流伺服电机电枢电压的“占空比”来更改平均电压,从而控制电机的速度。
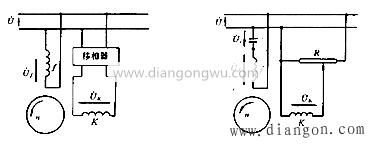
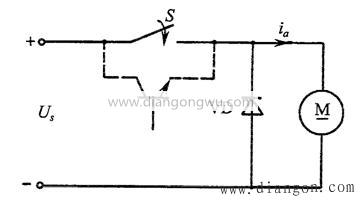
图中显示了PWM控制的示意图。可控开关S每隔一定的时间重复开/关,当S为ON时,电机U的两端都通电。为了供给能量,电动机存储能量,并且当开关S断开时,停止向电动机的能量供给。当开关S关断时,电枢电感中存储的能量继续使电动机电流通过续流二极管VD循环。
在电动机两端施加图中所示的电压波形,从电动机获得的平均电压如下。
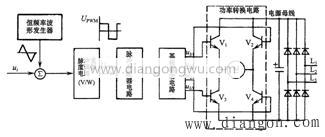
有一个公式。更改吨位和吨位可以更改速度,但这仅在该设备上可行。该图是PWM驱动系统原理的框图。
在图中,PWM驱动装置的控制结构可分为两部分:功率转换电路和将能量从主功率传递到电动机的控制电路。功率转换电路可以是H型和T型功率放大器电路。控制电路通常由基本电路组成,例如恒定频率波形发生器,脉宽调制电路,基本驱动电路和保护电路。
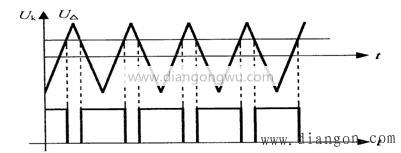
当三角波电压UΔ和直流电压Uk发送到放大器时,如果三角波高于控制电压,则输出为“空”,反之,输出为“占空比”,占空比可以通过改变控制电压Uk来改变。输出波形如图所示。
脉冲分配电路根据功率转换电路的工作模式对V/W转换信号执行适当的逻辑转换,并将其分配给基本驱动电路,以满足开/关定时脉冲的电压要求。当电源转换电路工作时。
热门资讯:

请关注我们
江西电机
地址:上海市松江区莘砖公路399弄
座机: +86-021-6992-5088
传真: +86-021-6992-5099
邮箱: 18717976220@163.com
Copyright © 2020 江西电机 版权所有 网站图片内容来源于网络,如有侵权请联系删除。
沪ICP备16040912号-18