
步进电机有几种(步进电机的静态转矩特性)
- 发布时间: 2021-03-11
- 分类:公司动态
- 作品声明:内容由AI生成
- 来源:网络
步进电机的线圈通过直流电通电时的负载转子的电磁转矩(恢复与负载转矩平衡产生的电磁转矩称为静转矩或静转矩)与功率角转子之间的关系这称为电动机的静态转矩特性。如下图所示:
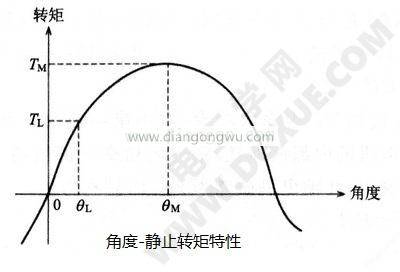
由于转子是永磁体,因此产生的气隙磁通密度为正弦波分布,因此理论上静态转矩曲线为正弦波。该角度固定转矩特性是步进电动机产生电磁转矩的能力的重要指标。大转矩越大越好,并且转矩波形的正弦曲线越近越好。实际上,在刺激下存在齿槽转矩,这会扭曲所产生的转矩。例如,两相电动机的齿槽转矩是加到正弦静态值上的静态转矩角周期的谐波的四倍。扭矩,上图中所示的扭矩如下。
TL=TMsin[(θL/θM)π/2]
其中,TL和TM分别代表负载转矩和大静态转矩(或保持转矩),相应的动力角为θL和θM,该位移角的变化决定了步进电机的位置精度。根据上面的公式:
θL=(2θM/π)arcsin(TL/TM)
在前面的过程中提到了PM型永磁步进电机和HB混合式步进电机的步进角θs。 θs=180°/PNr,将角度更改为机械角度(以弧度为单位),我们得到以下公式:
θs=π/(2Nr)
上面的公式Nr是转子齿或极对的数量,因此两相电动机θM=θs。
负载扭矩是带有电磁扭矩的负载(例如弹簧力或重物的提升力等)。电动机来回移动时,角度偏差为2θL。 ΘL应该很小以增加定位精度。因此,根据公式θL=(2θM/π)arcsin(TL/TM),您需要选择大静转矩Tm大且步距角θs小的步进电机。 -解析电机。根据公式θs=π/(2Nr),我们可以看到θs越小,Nr越大越好。
另外,高分辨率步进电机的转子结构可大致分为PM型,VR型和HB型,其中HB型具有分辨率。由于PM型定子极的爪级结构,定子极数的增加受到机加工的限制。 HB型转子的表面没有齿,并且N极和S极在转子表面交替磁化,因此极数为极对Nr。同样,转子极Nr的增加也受到磁化机的限制。如果VR型转子的齿数与HB型相同,则可以使用相同的Nr,因为不使用永磁体,但是步距角θs是HB型的两倍,并且由于没有永磁体极,大扭矩Tm小于HB型。
当两相步进电动机的外径约为42mm,Nr=100个齿,并且步进角为0.9°时,它是实际使用中的高分辨率。随着Nr的增加和电抗的增加,转矩在高速下降低。因此,Nr=50且步距角为1.8°的电动机被广泛使用。对于HB型结构,整个步进状态下的步进角精度为±3%,步进电机工作角θ=nθs,并且每个步进均无累积误差。如果电动机速度足够大,则增加n。尽可能提高定位精度(θs小)。
热门资讯:

请关注我们
江西电机
地址:上海市松江区莘砖公路399弄
座机: +86-021-6992-5088
传真: +86-021-6992-5099
邮箱: 18717976220@163.com
Copyright © 2020 江西电机 版权所有 网站图片内容来源于网络,如有侵权请联系删除。
沪ICP备16040912号-18